
|
|
组合握持机械手工作原理及结构设计应注意的问题 二维码
1100
来源:JZ Robot网址://xhrxyx.com/h-nd-163.html 同位素分装机是以PLC作为主控制系统,利用液压缸作为主驱动动源,借助于各类机械手和装置来完成系统内各部分的规定动作。释放器装入同位素后旋上大、小盖部分的液压控制系统及动作过程如图1所示。 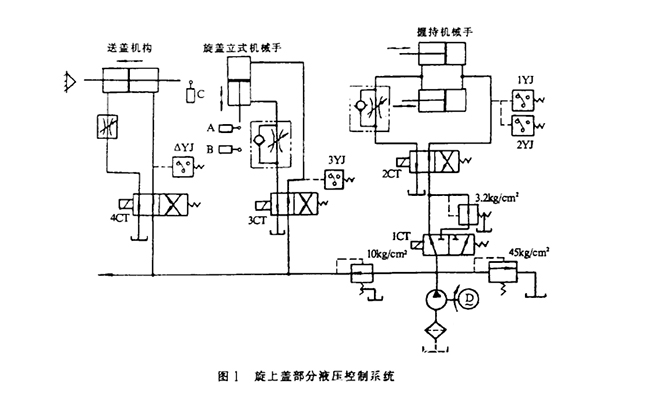 组合握持机机械手的结构如图2所示,它采用两个铰支液压缸作为动源分别驱动两侧手臂,这有利于减少其空间尺寸。在条件允许的情况下,也可改用一个液压缸驱动。 首先,在液压缸的元件腔通入较高压力的油(45kg/cm²),活塞杆伸出推动小转臂带动大转臂对合,大手头夹紧保护筒后,将克服扭簧的弹簧力使小转臂相对于大转臂转动。通过小转臂端部的拔销推动推杆,使小手头对合,定位并夹紧释放器。此时,在一侧的调整垫处存在微小间隙量。  释放器盖旋入后,液压缸的有杆腔进油,活塞杆回返,带动大、小转臂返回到原始位置。之后,液压缸的无杆腔通入较低压力的油(3.2kg/cm²),推动手臂重新对合。由计算可知,油压较低,不足以压缩扭簧,合紧后小手头仍滞留在大手头中间的导槽内。此时,大手头夹紧保护筒,起着保护筒盖落入时的导向作用。 保护筒旋入后,液压缸的有杆腔二次进油,大、小手臂退回原位,完成一个工作循环。 在上述工作循环过程中,大手头夹紧保护筒导向只利用较低油压作用下,通过手臂的二次开合来完成,而没有依靠扭簧力矩的反弹实现。这是因为手臂在运动过程由于多种因素的影响会产生较大的阻力矩(在受力分析中略去),使小手头不能完全回退,故不影响大手的正常工作。这在实际操作中已经得到验证。 结构设计中应注意的问题 扭簧的使用:圆柱螺旋扭转弹簧在机构中多应用子运动部件,而在组合握持机械手中是作为动力部件使用的,由此省去两个小手头驱动液压缸。以扭簧作为动力部件使用,由于其作用力值较大,往往其结构尺寸也较为庞大,会给设计带来较多麻烦,乃至结构上无法实现。因此,设计时应根据其载荷大小,工作角度及可能具备的空间位置综合考虑。当**工作转角未68°,**工作转角为68°,**工作扭矩小于2000kgmm时,在结构上较容易实现。 小手的导向:为防止小手头及推杆在运动过程中产生摆动,确保手头握持的位置度及运动的稳定性,对小手头和推杆分别进行导向。这是一种过定位的导向形式,极易发生干涉而导致运动障碍。为此,手头处的运动间隙量应当小于推杆导向处的间隙量。在设计中、小手头导向处配合34H7/h6,推杆导向处配合为Φ20H7/g6,其对称度为0.015mm。 小手头握持中心的调整:小手头夹握释放器是以大手为基准进行定位,这可以减小基准的转换误差、提高其定位精度。在实际工作中,由于二个扭簧的力矩值不会均等,以及两侧构件运动阻尼的偏差,两侧手臂的运动不会同步;又由于各个简体之间存在一定的偏差,所以,大、小手头握持后其对中度应能够调整。其调整过程是依靠修磨大、小手头定位面之间的调整垫来完成的,调整垫厚度2.5mm。 盖体落入时的缓冲:当盖体落下时,盖与相应的简体之间会产生一定的冲击。由于释放器选用较硬的不锈钢材料,且质量较小(约0.3kg),下落距离较短,所以不会影响其正常工作。而保护筒部分为铜质铅夹层材料,其材质铰软、质量较大(3.2kg),且下落距离又略大于前者,因而,极可能破坏入口部分的工作螺纹,影响盖体的旋入。为此,需要附设缓冲装置。弹簧片沿导向壁对称布置4个。在盖体下落时,由于接触并压缩簧片而产生阻尼,减缓盖体下落时的相互冲击,避免构件损伤。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |