
|
|
控制系统的基本概念及机器人控制系统的分类方式 二维码
1637
来源:JZ Robot网址://xhrxyx.com/h-nd-165.html 机器人控制系统是由控制装置、机械手形式的受控对象、行走装置(在可移动的机器人的情况下)以及其他一些装置所组成。其它装置是指那些属于机器人,但结构上和操作上独立的装置。 由于控制机器人的主要任务是控制机械手,因此,下面介绍机器人控制系统时主要指的是机器人的机械手控制系统。如果控制机器人的其它装置时,将会特别说明。控制机械手的基本原理同样适用于控制机器人的其它装置。 可作为控制系统分类依据的主要特征是: (1)控制运动的方式(程序控制系统、按照外界状态而作用的控制系统,包括适应性系统及复合控制系统); (2)控制装置的信号类型(连续作用系统和离散作用系统); (3)同时控制机器人的数目(单控系统和群控系统); (4)操作人员参与的特点(自动控制系统和自动化控制系统)。 下面根据这些特性进一步研究控制系统分类问题。 机器人控制系统按控制运动的方式分类: 根据这一特征,系统可分为程序控制系统,按照外界状态作用的控制系统以及同时采用这两种方式的复合控制系统。 图1示出了**类系统,即程序控制系统的方块图。图中受控对象即是机械手。给机械手的每个运动自由度的传动系统施加控制作用,就可控制机械手,控制装置包括时间程序装置、信息变换器(变换由时间程序装置送来的信息)以及执行装置(它直接对机械手传动装置进行作用)。 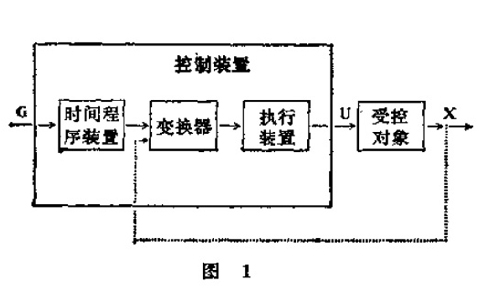 输出量X表征受控对象的状态。X是一个向量。它的各分量即是机器人机械手的各运动自由度的坐标。控制作用U简称控制,也是向量。控制作用由控制装置加到受控对象(指机械手所有运动自由度)的输入端。给定作用G简称给定。G包括输出量X要求的(或给定的)变化规律X₃(t)的信息。X₃作为控制程序加给时间程序装置。控制目的就是保证等式X(t)=X₃(t)成立。这里X₃是输出量X的给定值,X₃是以程序形式给定的时间函数。若机械手每个传动装置都完成实现相应运动自由度的给定程序,则机械手就可以完全实现相应运动自由度的给定程序,则机械手就可以完全复现所需求的空间运动。 程序控制机器人的典型实例是**代工业机器人,也就是几乎所有现今业中采用的机器人。 编制程序(即图1中的G)的方法有: (1)按机械手给定轨迹的坐标来编制程序; (2)按工业范围内轨迹的坐标形式来编制程序。这就要求把这些坐标变换成机械手运动自由度的实时坐标。这种变换是由图1所示的变换器完成的; (3)按标准的操作名称(必须把完成操作的实际条件具体化)来编制程序,或者按操作顺序来编制程序。这时,机器人控制装置根据G值能够自动计算出运动轨迹。为此,相应地要求有比较复杂的信息交换器(见图1),甚至要用电子计算机。这时,可以在机器人开始操作之前进行轨迹计算,也可以在机器手传动装置执行程序的过程中进行计算。但是,这种计算应比机械手执行程序提前一定的时间。 有两种计算机轨迹的方法,求**解的方法和在给定的范围内求出一个允许解的简单方式。 编制程序的方法不同,程序控制系统也不同。在一些控制系统中,通过计算机械手的运动轨迹来编制程序(可以在机器人之外计算运动轨迹,然后往时间程序装置中顺序地输入程序;也可以在机器人本身的控制装置内进行运动轨迹的计算)。在另外一些程序控制系统中,用示教法编制程序。所谓示教法就是:操作人员手控机器人或者是机器人的机械手由操作人员手动,使机械手产生机械位移,此时机器人完成所要求的动作,并把产生这个动作的控制作用(即信号)U记录下来。 按运动自由度的运动形式,系统可分为连续运动系统和离散运动。连续运动系统中每一个运动自由度的运动轨迹是连续的。离散运动系统中每一个运动自由度的运动是由程序给定的、不连续的、有限的点位序列。 完成连续运动的系统称为轮廓式控制系统。完成离散控制运动的系统称为点位式控制系统。循环控制系统是点位式系统的最简单方案。在这种系统中,机械手每个运动自由度的每一个坐标的程序点数目是起点和终点,有时再多几个中间点。现时的点位系统能够保证每个运动自由度由几十个,甚至上百个程序点。 当一个机器人的每个运动自由度采用不同类型的控制系统时,这种系统称为复合控制系统。 程序控制系统是最简单的系统。但是,只有在完成操作(在要求的精度范围内完成操作)的整个工作期间,工作条件完全确定和不变的情况下,才能采用这种系统。工作条件指的是外界环境、机器人本身的情况及控制目的。控制目的在机器人开始工作之前就应该完全确定下来。 机器人的程序控制系统可以是连续作用的或离散作用的开环控制系统和闭环控制系统。在闭环系统中输出量X有反馈(如图1中虚线所示)。在连续作用的系统中,不仅时间程序装置,而且机器人的所有其它装置都应是连续作用的。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |