
|
|
机械手爪定位传感器及人工眼超声波信息系统介绍 二维码
1048
来源:JZ Robot网址://xhrxyx.com/h-nd-173.html 一种在手爪上的超声波近距定位敏感位置,其特点是用同一个可逆变换器作为发射器和接收器。为此,专门研制了这种可逆変换器。 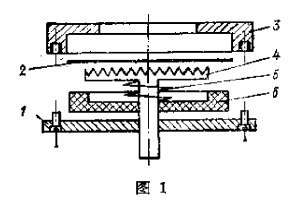 它是一种变相的电容式传声器。这种传感器的结构如图1所示。 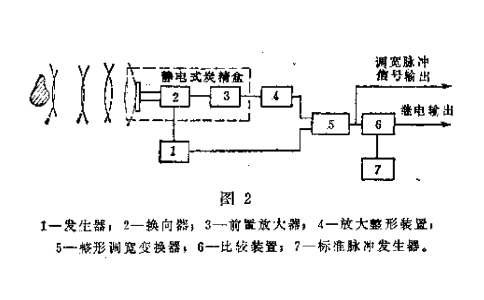 其中,1-盖;2-薄膜;3-外壳;4-固定不动的电极;5-弹簧;6-绝缘垫。传感器的原理结构图如图2所示。发生器1产生一系列断续的高压单脉冲。这些脉冲经过换向器2送到静电盒。在电场作用下,盒中薄膜产生振动薄膜产生振动,并在空气中发出超声波脉冲。反射回来的脉冲也由这盒接收,经过装在机械手指上的前置放大器3放大,再经过放大整形装置4后,加到整形调宽脉冲宽度与物体的距离成正比。得到的调宽脉冲信号就可作为传感器的输出参数。此外,在图中预定规定,由标准脉冲发生器7产生的脉冲宽度确定一个标准量,在比较装置6在信息脉冲和标准发生器产生的脉冲相比较,当调宽脉冲信号小于这个标准量二倍时,就产生距离改变的信号。 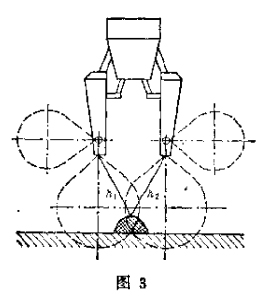 传感器在机械手爪上配置情况如图3所示。在二个手指的每一个手指上都装有4个指向不同方向的传感器。装在端面上的两个传感器除测量到物体的距离外,在某些情况下还可将手爪轴引导并准确地定向在物体所在的方向上。这一对传感器构成了立体观测幅。当两个传感器的信号相等时(即相当于距离h1和h2相等),手爪轴和物体轴(物体形状要很规则)相重合。 能给出整个工作区域内物体空间关系的信息的感觉装置很复杂。这种装置目前研制得还很少。人通过视觉器官可以获得这样的信息。根据现在的技术水平机器人机械手完全复现人的视觉器官的功能还是办不到的。所以非常重要的是,在机器人的视觉系统要合理地确定最起码的功能。 现在为了获取二维码景象信息采用不太复杂的坐标式和感受面式敏感装置,也可以采用在某种程度上和人的眼睛相似的人工眼。 所谓感受就是一个在它的上面均匀安装许多敏感元件(如微型开关)的平面。在感受面之上的物体对位于其下的敏感元件发生作用。由此得到各物体的平面形象。根据这些就能确定各物体的相应位置、物体方向、零件的重心在敏感面上的投影以及其它内容等等。应该指出,物体在水平面上的投影通常比在其它面上的投影包含更多的信息。 用相当简单的方法就能测得随搬运装置移动的零件在水平面上的投影以及零件坐标的信息。在这种情况下,只要在垂直零件运动的方向上装一排光敏传感器,而且传感器周期地发出检测信号就可以了。 人工眼的超声波信息系统是在上述感受面的基础上发展起来的。这种系统能够得到关于零件在三维空间中的位置和外形的信息。敏感元件是许多从零件下表面进行探测的超声波传感器。由于零件上表面反射回来回波脉冲,其中就含有在这个传感器之上的零件的高度信息。各传感器要依次进行探测。 在现时所研究的人工眼系统中,可以是含有一个摄取平面图像的电视摄像机和一个确定物体第三维坐标的测距仪;也可以是含有两个电视机摄像机,而用双筒望远镜法或其它方法测定第三维坐标。 实现人工眼系统的主要困难是图像的视觉信息处理复杂。这种信息量不大。一般用途的摄像机即可接受和传递大量的视觉信息。但这种信息结构复杂。视觉信息各个单元(或形象)之间的结构关系非常复杂。必须用人工智能的方法才能分析这种关系。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |