
|
|
工业机器人的电动传动装置介绍及其根本性的特点 二维码
1097
来源:JZ Robot网址://xhrxyx.com/h-nd-189.html 在不久前电动传动的机器人还是为数不多的,并且大部分机器人具有气动或液压传动装置。但是,正像前面已指出的那样,近几年来电动传动的工业机器人机械手的数量很快增多。这首先是与机电式机器人有一些根本性的优点有关,如易于安装和调整,使用方便,不需要管道,工作时噪声水平低等等。 在不久前,由于没有相应的专用电动机,机电式机器人的发展还是受到限制的。可是这一空白逐渐地给填补上了。这是因为研制出了参数有很好改进的电动机,例如过载能力高的电动机,转子转动惯量小的电动机,以及研制出了新型原理的电动机,如圆柱形转子或圆盘式的印刷电动机,光滑转子电动机,直线运动电动机等。 工业机器人既可采用离散作用,又可采用连续作用的电动传动装置。点位控制的以及按循环控制的机器人采用离散作用的电动传动装置,它的原理图如图1所示。在这里为保证在给定点上定位,速度是按离散式(有级的)进行控制。在最简单情况下,这可以是继电方式控制的电动机。此时最常用的是交流电动机,而用起动器或继电器作为功率放大器。 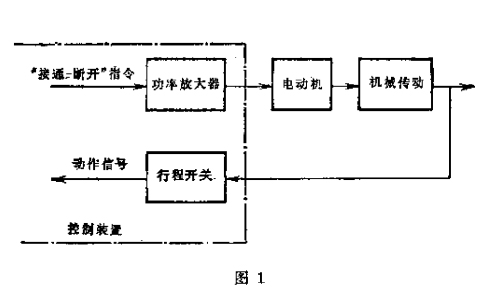 通常用如下方法实现变速; (1)当使用直流电动机时,采用在点枢回路中串入降压电阻方法变速; (2)当使用交流电动机时,采用切断某对磁极的方法或转接到其它电动机的方法变速。 用弹簧阻尼器或各种形式的制动器制动。 在轮廓控制中,要求连续地控制传动装置的位移和速度。在这种传动装置中,和连续作用电机一样,步进电机也同样得到了应用。步进电机能保证定位精度为一个步距,而相应的速度精度为单位时间内的一个步距。由于步距很小,步进电机传动的精度实际上与连续作用传动的精度相当。 在工业机器人中采用电动传动装置有一些根本性的特点。**个特点是,和所有的工业机器人的传动装置一样,机器人在因机器人机械手形状变化而使负载强烈变化的条件下工作,这就导致对电动传动装置的刚度有一定的要求,所以工业机器人的电传动装置通常要有,例如说,单独的速度稳定回路。在此种情况下常常是用直流测速发电机作为速度传感器。 工业机器人传动装置工作状态的第二个特点是,归算到输出轴上的负载转动惯量变化非常大(甚至可达几十倍),而且这种变化还和机械手的各环节的相应位置的变化有关。既然上述的变化是直接发生在由传动装置完成的程序运动的过程中,那么对传动装置的动态特性也应提出相应的要求。 工业机器人的电动传动装置的第三个特点是,在实现移动中必须保证无振动,及无超调,为的是方式机械手对服务设备和生产装置产生冲击。 有感觉的机器人采用电动传动装置时,除上述要求外,还附加有许多特殊要求。这些要求首先是因为必须实现更复杂的和灵活的控制算法。其中包括改变机械特性,改变启动制动状态,按外界环境的信息来控制作用力,等等。这在特殊情况下更为必要,例如当完成一连串的装配工序时,对易碎的物品进行操纵时,和需要由机械手的协调动作来完成要求的坐标控制工序时。实现上述各种控制,通常通过控制装置来改变机器人机械手各运动自由度的传动来实现。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |