
|
|
工业机器人控制装置,机械手传动装置 二维码
793
来源:JZ Robot网址://xhrxyx.com/h-nd-198.html 无知觉的工业机器人控制装置,就是控制机器人机械手各环节移动的程序控制装置以及同生产设备相联系的装置。图1给出了无知觉的工业机器人的一般控制方块图。在控制台上给出所要求的工作状态,并显示机械手和控制装置的实际工作状态,工作程序存储在存储装置中。控制位置部件的作用是用机械手和生产设备的传动装置来实现给定的坐标或轨迹。控制转换部件的作用是检测前一步程序完成的情况,存储已完成的程序号码,并给出执行下一步程序的信号。时间装置用来按程序形成一定的时间滞后。记忆装置、控制转换部件和时间装置联合起来构成了程序时间装置。对任何程序控制装置它们都是最基本的装置。 工业机器人控制装置: 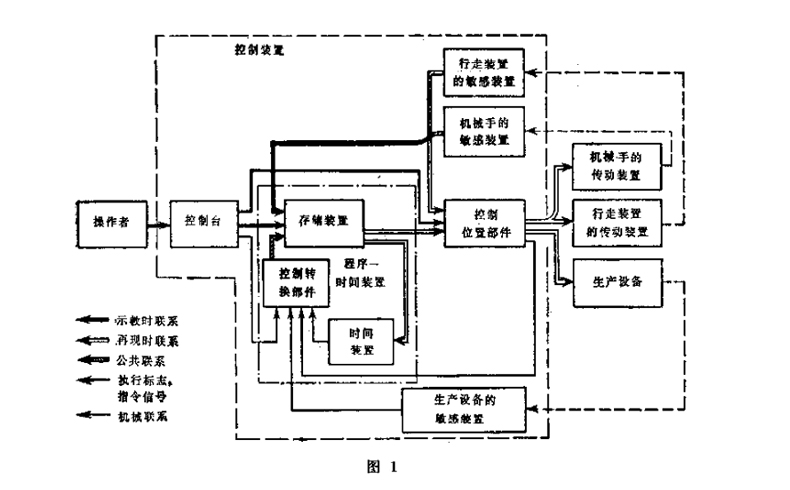 在图1所示的方块图中,给出了控制装置同操作者、机械手各环节的传动装置、机器人行走装置的传动装置、生存设备等之间的联系,同时也表示出了各种装置的各个部件之间的内部联系。以带箭头的黑粗线表示机器人编程序时的联系;以带箭头的二根西线夹空白恩德线表示再现程序时的联系;以带箭头二根线中间夹有细斜线的线表示编程序和再现程序二种情况下共用的联系;以带箭头的细实线表示执行完一步程序的信号以及转换程序的指令;以虚线表示机器联系。 按预先编好的不变程序进行工作的无知觉机器人,在有关要求的作用信息方面,操作者是**的信息源。信息以程序形式存入机器人的存储装置中,然后机器人在自动工作状态下执行这一程序,机器人从外部再得不到其他任何信息。因此,在编制机器人程序之前,操作者要确定机器人动作的顺序和为完成所要求的工作应接入的生产设备顺序。之后,编制见其人动作程序,并将程序存储到控制装置的存储器中去。编制程序和存储程序的方法有: (1)计算程序,随之把程序输入到存储装置中。在这种情况下,信息传递的顺序是:操作者——控制台——存储装置。 (2)在控制台用手控制机器手的状态下,在完成一次典型的操作的过程中,在示教的同时输入程序。在这样情况下,实现手控的顺序是操作者——控制台——控制位置部件——机器手。而输入程序的顺序是:机器手敏感装置——存储装置。输入信息的指令传递途径是:控制台——控制转换部件——存储装置。 (3)操作人员用手使机器人机械手产生机械位移,进行示数的同时输入程序。输入程序的实现和前一样情况相同。 当处于按程序进行自动工作的状态,信号从控制装置输出端加到机械手和机器人行走装置的传动装置以及生产设备。它们在信号作用下按程序完成给定的运动。 机械手传动装置: 程序信息是按一定结构组成的,其中包括关于被控制环节所要求位置的信息单元及实现该要求位置的时间信息单元,这些单元由转换指令联结起来(动作顺序信息)。离散或模拟形式的相应于机器人单元操作的数字(指令)乃是最简单的单元程序信息。机械手一个环节的移动、手爪的抓紧-张开、延迟时间、发布生产指令等都是单元操作。根据不同的单元操作,单元程序信息相应的数字包含有从一个比特信息(如开关型操作)到13~14个比特信息(如机械手环节的精确移动)。 有完整意义的一组单元操作(例如,当各环节协同工作时,机械手手爪移动到某一点),它对应于按着总的要求联合执行的一组数字,即程序段。许多程序段能够组合成一个子程序,这一子程序对应于机器人的完整的、不太长的动作序列。 再现程序时,根据存储在控制装置中的再现程序的规定确定送出各个数字、程序段和子程序的顺序。再现程序的规定可以是正规的再现顺序,或者是根据机器人的一定的内外条件有变化的再现顺序。 内部条件通常是由控台给出或者存储在存储装置中。考虑内部条件可使控制产生附加的功能。举例说,根据计数器给出的数字多次执行个别程序段;根据执行循环的号码改变个别程序指令等等。因为由操作者给定的内部条件在执行程序过程中是不变的,所以考虑内部条件的工资,自然还是属于按已编制好的算法进行工作的。装箱就是考虑内部条件的一个典型例子,这时必须考虑能装入箱内的零件数,并且要考虑装箱过程中从一个工作循环到另一个工作循环时箱内格位的变化。 外部工作条件的信息以生产流程的信号形式加到机器人控制装置中,并且能使机器人在工作过程中转换到其它程序,执行或跳过个别程序段、改变个别程序指令,转换成考虑内部条件的工作状态等等。这就使得机器人能够灵活地反应生产过程的变化,当编织机器人机械手的程序时已预先考虑了这种变化。所以现代的工业机器人控制装置,都能按照预先规定的为数不多的(5~10个)内外条件的信号进行控制。内部或外部条件信号加到控制装置的控制转换部件中去(参看图1),并改变执行下一个指令的号码。 确定控制转换部件的装置的原则是,产生已处理完当前的程序段的标志,并准备处理下一个程序段的信号。可利用如下三种基本原则产生这种信号;根据传感器的信息、按照时间原则或按照二者的组合的原则产生转换信号。 在**种情况下,当完成前一个单元操作时,由传感器发出一系列信号或者由控制位置的部件发出信号。在第二种情况下,每经过一定的时间间隔(代表给定的这一步的时间)就由时间装置发出向下一步转换的信号。在第三种情况下,对不同的步子,或者按**种原则,或者按第二种原则发出信号。 按时间原则就不需要由传感器产生转换信号。在这种情况下,或者在每一步开始时由被触发的时间装置发出转换程序信号,或者在开始执行程序循环时,由被触发的计数装置发出转换程序信号。在这种情况下,并没有证明程序是否实际已被执行了。 控制转换部件通常包括步数记录器、程序转换交换器和执行信号同步触发电路。
文章分类:
行业新闻
 |

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |