
|
|
限位器式点位控制工业机器人工作原理和结构特点 二维码
1109
来源:JZ Robot网址://xhrxyx.com/h-nd-201.html 实现限位器式点位控制方法的控制装置是最简单的点位控制装置,一般都称为循环式控制装置。 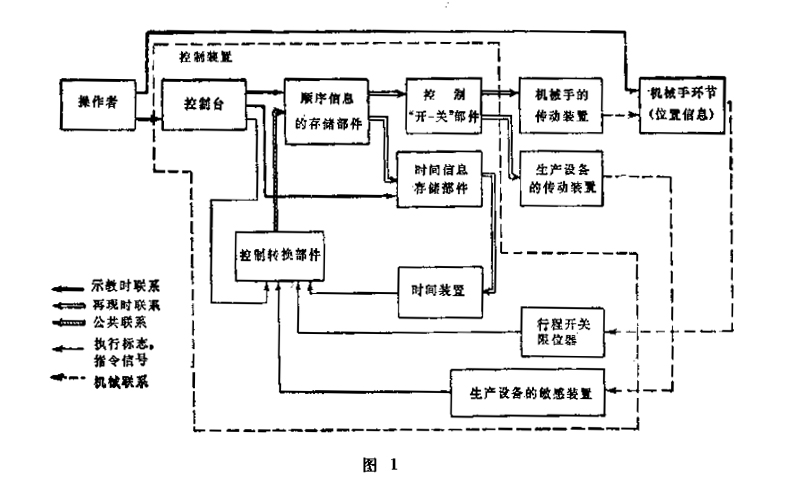 限位器式点位控制工业机器人的原理图如图1所示。此时,存储器通常是由顺序信息、位置信息和时间信息的分立存储部件组成的。分离出位置信息是按限位器定位的机器人机械手的结构特点。以限位器的一定位置或者机械手各环节的行程开关的标志形式存储位置信息。用转接元件和由许多转接元件组成的部件存储顺序信息,其中有;插孔版(“阿依达”型、ПР-10И型、旋风3Б型机器人),程序鼓(带有穿孔卡的程序鼓的СМТ-1000型机器人),插头(“电勒克司”公司的控制装置),多位转换开关(МП-5、МП-9型机器人)和翻转开关等等。常用电位计给出时间信息,并用继电器式的时间装置或用类似的部件的部件加以处理。 在循环控制装置中,控制位置的部件向机械手各环节的传动装置和加工设备的传动装置发出“开-关”指令。通常是用有触点和无触点的继电器构成这种控制位置的部件。由各种转换元件(如步进选择器、带译码器的计数器、移位寄存器等等)构成控制转换的部件。 在编制机器人程序时,操作者输入各环节位置的信息(将机器人机械手的环节上的限位器或行程开关的标杆移到要求位置处),并把执行程序时的顺序信息和延迟时间的大小存入控制装置中。执行程序时,要将完成单元操作的顺序的信息加到“开-关”控制部件中去。该部件接通和断开机械手的各环节和生产设备的传动装置,以便保证环节的运动与预先编制的程序顺序相对应。用自然数码对每一个环节的要求位移和实际位移进行比较。比较元件可以是传感器或者是机械限位器。对于前一种情况,当要求位移与实际位移一致时,传感器给出标志转换到执行下一步的信号;而在后一种情况下,根据时间装置给出的信号转换到执行下一步程序。当所有环节到达由程序段给定的位置时,从传感器或由时间装置得到的信号加到控制转换部件中,控制转换部件产生转向下一步的信号等等。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |