
|
|
机器人机械手点位控制装置和传动装置的工作原理 二维码
1273
来源:JZ Robot网址://xhrxyx.com/h-nd-207.html 当程序的信息容量不大时,点位控制装置中各种信息的存储装置采用分立式结构,例如“罗克斯Ⅱ”型机器人的ТКС-10控制装置。此时,每一信息存储在对它说来最合适的元件中。例如,顺序信息存储在插孔板中,而位置信息和时间信息存储在电位计中。在最简单的点位控制装置中,这种分立结构能更灵活地利用程序信息。在程序容量增大时,位置信息和顺序信息可以结合起来,并且存储在存储装置的一个部件中(例如“龙尼曼特”机器人);或者位置信息、顺序信息和时间信息集中地存储在一个部件中(RC-700,УПМ装置)。在这种情况下,使用存储装置比较方便,这就保证了能灵活地应用信息。 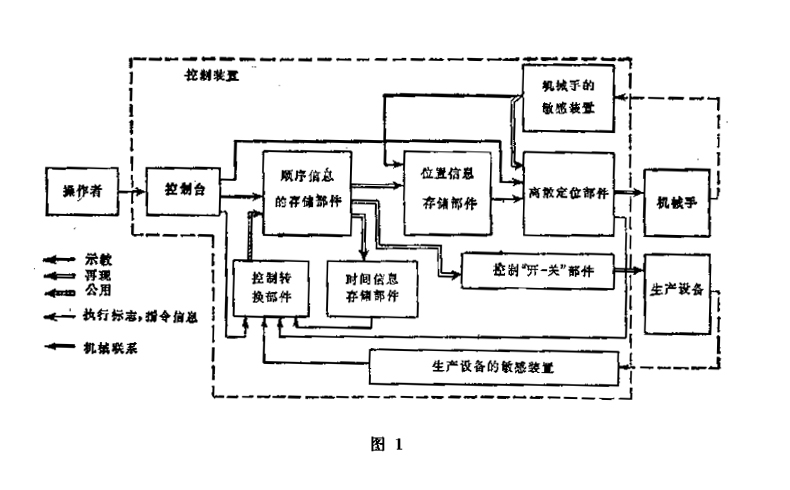 点位控制原理图如图1所示。点位控制装置的控制位置部件是由控制机械手环节位置的离散定位部件和控制生产设备的“接近-断开”部件组成。离散定位部件是对给定程序与机械手敏感装置引出的机械手环节的位置信号进行比较的装置,或做成能向机械手的步进式传动装置给出定量控制作用的装置。实现点位闸的位移时,离散定位部件足以能够对机器人的机械手传动装置形成离散(阶梯)的位移控制作用。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |