
|
|
机械手的微处理机控制系统及其软抓取的工作过程 二维码
1168
来源:JZ Robot网址://xhrxyx.com/h-nd-160.html 机械手的控制全部由微处理机来完成。图1为机械手系统构成简图。该系统中微处理机有以下几个作用:1、监视滑觉、接近觉、接触觉三种传感器,随时对传感器输出进行采样,然后进行判断和处理。2、根据对传感器判断结果,向系统发出控制信号,此信号既是动作指令,又是希望的控制量。3、根据工作程序的要求,对机械手的动作进行顺序控制。 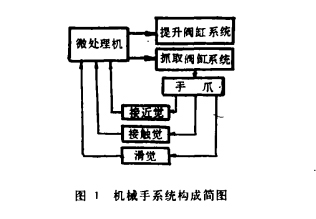 机械手进行“软抓取”的工作过程如下。 1、微机先发出初始信号,手臂上升到一定高度,手爪张开到**位置。 2、微机发出下降信号,通过电液伺服系统,使提升缸动作,手爪下降。 3、当机械手手爪下降到接近物体时,接近觉传感器向微机发出信号,微机按程序要求延时,使手爪继续下降,停止在抓取物体合适的部位,并开始夹持动作。 4、当手爪闭合到与物体接触时,接触觉传感器向微机发出信号。微机接到此信号后,立即发出指令,停止闭合手爪,并开始提升,同时检测滑移信号。 5、若提升时物体发生滑移,滑觉传感器向微机发出信号。微机接到此信号后,立即命令停止提升,并且再下降到原来的起始位置,然后按程序设定的要求,发出一个适当宽度的脉冲信号,使抓取缸运动一定距离,达到增加握力的目的。 6、手爪握力的增加量由微机延时程序控制,可通过改变延时时间,也可通过改变脉冲的电平高低来调节。延时后,微机再发出停止增加手爪握力及再次提升的指令。 7、若提升时物体无滑移,滑觉传感器无信号输出,夹持力不变,提升缸继续上升,把物体提升到设定的位置。否则返回到步骤5。 整个过程的微机程序流程图如图2,微机程序采用汇编语言编写。 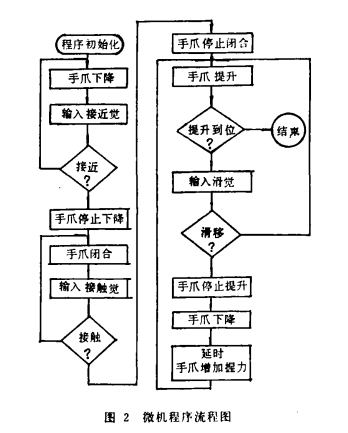 实现“软抓取”的关键过程是5、6、7步。该过程的信号传递框图如图3所示。可以认为系统的输出目标值是△W等于或略小于零,即希望握力产生的摩擦力等于或略大于物体的重量。在抓取不同重量物体的过程中,该系统能自动调整握力,达到新的平衡。 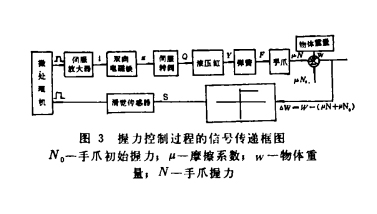 对于微处理机来讲,输入量是各传感器的输出脉冲信号,而输出是不同幅宽的脉冲信号。脉冲信号的幅值通过各处的工作电压来调整,在工作过程中一般不再改变。整个过程采用脉冲信一号来控制,因此信号处理简单,可省去一般需用D/A和A/D转换,仅用PIO接口就可以,这是本系统的一个特点。 在试验中,首先用机械手抓取软木的试验,并人为地制造滑移,取得成功后,分别对空火柴盒、玻璃瓶、钢块进行了抓取试验。抓取空火柴盒时,初始握力(即接触觉传感器的导通力)就可抓起,没有发生滑移;而抓取玻璃瓶和钢块时,初始握力不足,发生滑移,并经过几次增加握力后,物体才被抓起。 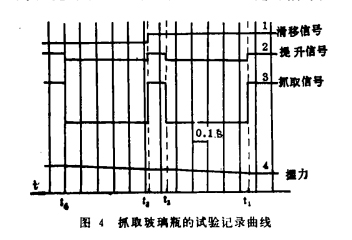 图4是抓取玻璃瓶时,用光线示波器记录的试验曲线。曲线1为从滑觉传感器取出的滑移信号,电位变化表示有滑移;曲线2为从提升缸的伺服放大器取出的提升信号,高电位表示提升,曲线3为从抓取缸的伺服放大器取出的抓取信号,低电位表示抓取;曲线4为取自抓取缸位移量的握力信号,曲线向上表示握力增加。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |