
|
|
液压机械手握力的软抓取控制及伺服驱动系统介绍 二维码
1068
来源:JZ Robot网址://xhrxyx.com/h-nd-159.html 随着科学技术的发展和生产实践的需要,不仅要求搬运机器人能进行握力不变的刚性抓取,而且能实现握力可控制的软抓取。在国内外各种机械手研制中,“软抓”是一个令人感兴趣的课题。本文介绍我们研制的具有二个自由度(提升和抓取)的液压机械手。它能对不同重量的物体(小至一个空火柴盒,大至50N的铁块)进行软抓取。该液压机械手的电液伺服驱动系统为极化式双向比例电磁铁-伺服转阀-液压缸系统,具有体积小、输出力大、灵敏度高、工作可靠、价格低的特点,很适合小型机械手上使用。  液压机械手的结构: 图1为液压机械手的结构原理简图。采用两套电液伺服系统分别控制机械手的提升和抓取。抓取缸活塞杆位移通过弹簧、滑块和连杆机构控制手爪的夹持力,手爪为平行夹持型,手爪板可以更换,以便抓取不同形状的物体。 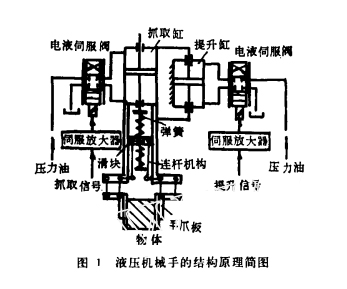 液压机械手握力的软抓取控制通过装在手爪板上的滑觉、接近觉、接触觉传感器和微处理机来实现。 传感器的研制: 为了实现“软抓取”,必须随时检测出机械手与被抓物体间的状态。这通过装在手爪板上的滑觉、接近觉、接触觉三种传感器来实现。 滑觉传感器: 它是三种传感器中最关键的检测元件,用来检测物体在夹持过程中是否滑移。我们作了压电式、电磁感应式、棘轮棘爪式和霍尔元件式滑觉传感器的试验。其中**种是利用压电陶瓷间接检测物体的振动来判断物体是否发生滑移后三种是利用检测磁场变化来判断物体是否发生滑移。试验表明,霍尔元件式**,它结构简单、体积小、价格便宜、可靠性好,并且信号无需任何处理就可直接与微机相联。其结构是采用多极扇形磁钢,利用滚轮摩擦轮转动时磁场变化,借助霍尔开关元件来检测滑觉信号。 接近觉传感器: 它的作用是当物体接近手爪板时发出信号。在此高效机械手上采用光电开关作为接近觉传感器。当物体接近手爪时,光线被切断,光电三极管发出信号。其特点是采用红外光作为光源,不受自然光的影响,工作可靠。 接触觉传惑器: 它的作用是当手爪板与物体接触时向微机发出信号,使夹紧动作停止,物体开始提升,并发出检测滑移的指令。该机械手采用干簧管开关作为接触觉传感器,通过调整装有小磁钢的弹簧片的厚薄和弯曲程度,可以获得很小的导通接触力(小于0.1N)。实验表明,干簧管的工作很可靠。 电液伺服驱动系统: 电液伺服驱动系统由伺服放大器、极化式双向比例电磁铁、伺服转阀及液压缸组成。其作用是将输入的电信号变换成液压缸活塞的相应位移。伺服放大器(包括激磁恒流源)是一台具有电流负反馈的直流放大器。由于采用了电流负反馈,有效地克服了电磁铁线圈电感和衔铁运动时产生的反电势,提高了电磁铁的动态特性。 极化式双向比例电磁铁,它的作用是将电信号转化为位移信号,推动小型伺服转阀。它采用动铁结构,恒定电流激磁,控制线圈采用差动连接方式,具有体积小、响应快(tr=2.7ms,ts=14.7ms)、线性度好(<1%)、频宽较高(一3dB为145Hz)的特点。 伺服转阀采用本室研制的电液伺服摆动马达的阀芯和阀套改装而成。该伺服转阀的阀口开闭用来控制提升液压缸和抓取液压缸的运动。液压缸它是电液伺服驱动系统中的执行元件。输出是活塞的位移。此液压缸采用双出杆型式。 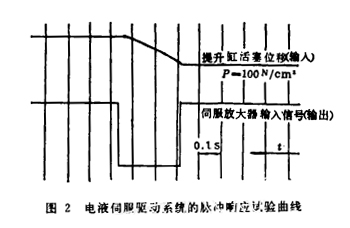 图2是电液伺服驱动系统对脉冲响应的试验曲线。由于液压缸是积分环节,所以活塞位移是一条斜线。由图可见,响应平缓,无超调量。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |